AlphaGo 与蒙特卡洛树搜索
之前章节介绍的强化学习方法都是无模型的强化学习 (model-free), 包括价值学习 (value-based)和策略学习 (policy-based)。本章介绍的蒙特卡洛树搜索 (Monte Carlo Tree Search, 缩写 MCTS) 是一种基于模型的强化学习方法 (model-based)。MCTS 比价值学习和策略学习更难理解, 所以本章结合 AlphaGo 讲解 MCTS。
AlphaGo 的字面意思是“围棋王”, 俗称 “阿尔法狗”, 它是世界上第一个打败人类围棋 冠军的 $\mathrm{AI}$ 。在 2015 年 10 月, AlphaGo 以 $5: 0$ 战胜欧洲围棋冠军、职业二段选手樊麾。 在 2016 年 3 月, AlphaGo 以 $4: 1$ 战胜世界冠军李世石。2017 年新版的 AlphaGo Zero 更 胜一筹, 以 $100: 0$ 战胜 AlphaGo。
AlphaGo 依靠 MCTS 做决策, 而决策的过程中需要策略网络和价值网络的辅助。第 $1$ 节用强化学习的语言描述围棋的状态和动作, 并且构造策略网络和价值网络。第 $2$ 节详细讲解 MCTS 的决策过程。第 $3$ 节讲解 AlphaGo 2016 版与 AlphaGo Zero 是如何 训练策略网络和价值网络的。
1. 动作、状态、策略网络、价值网络
1.1 状态
围棋的棋盘是 $19 \times 19$ 的网格, 可以在两条线交叉的地方放置棋子, 一共有 361 个 可以放置棋子的位置。两个玩家一方用黑色棋子, 另一方用白色棋子, 两方交替往棋盘 上放置棋子。棋盘上有 361 个可以放置棋子的位置, 因此动作空间是 $\mathcal{A}={1, \cdots, 361}$ 。 比如动作 $a=123$ 的意思是在第 123 号位置上放棋子。
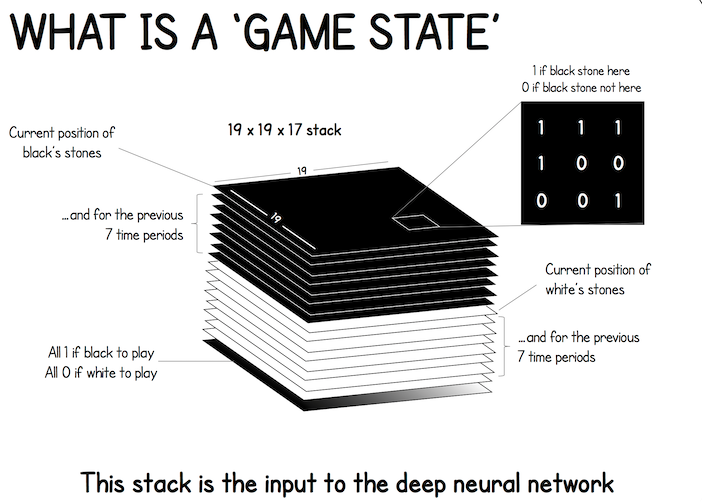
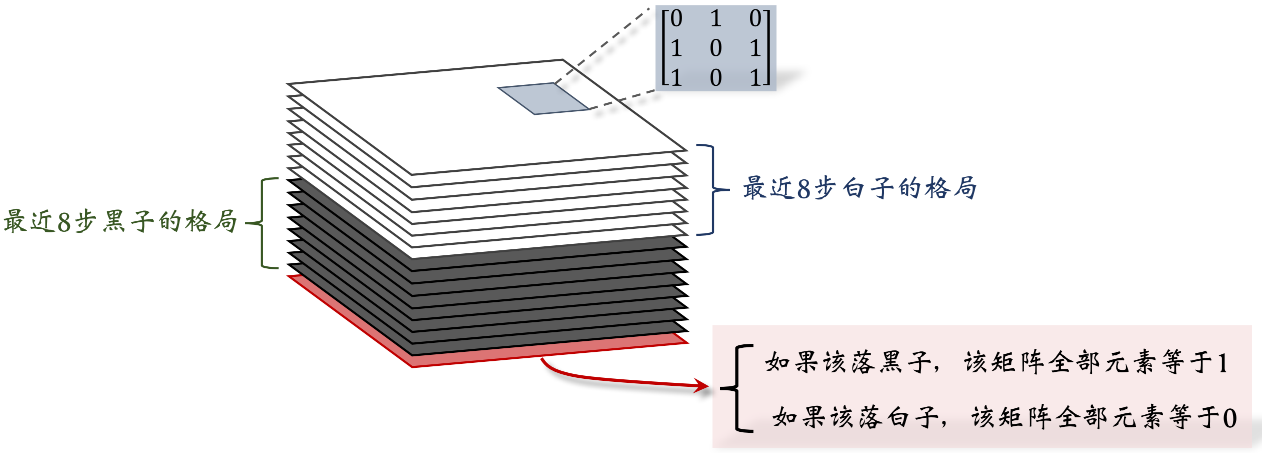
图 1: 状态可以表示为 $19 \times 19 \times 17$ 的张量。
AlphaGo 2016 版本使用 $19 \times 19 \times 48$ 的张量 (tensor) 表示一个状态。AlphaGo Zero 使 用 $19 \times 19 \times 17$ 的张量表示一个状态。本篇只解释后者; 见图 $1$ 。下面解释 $19 \times 19 \times 17$ 的状态张量的意义。
张量每个切片 (slice) 是 $19 \times 19$ 的矩阵, 对应 $19 \times 19$ 的棋盘。一个 $19 \times 19$ 的矩阵可以表示棋盘上所有黑子的位置。如果一个位置上有黑子, 矩阵对应的元素就是 1, 否则就是 0。同样的道理, 用一个 $19 \times 19$ 的矩阵来表示当前棋盘上所有白子的位置。
张量中一共有 17 个这样的矩阵;17 是这样得来的。记录最近 8 步棋盘上黑子的位置, 需要 8 个矩阵。同理, 还需要 8 个矩阵记录白子的位置。还另外需要一个矩阵表示该哪一方下棋; 如果该下黑子, 那么该矩阵元素全部等于 1 ; 如果该下白子, 那么该矩阵的元素全都等于 0。
1.2 策略网络
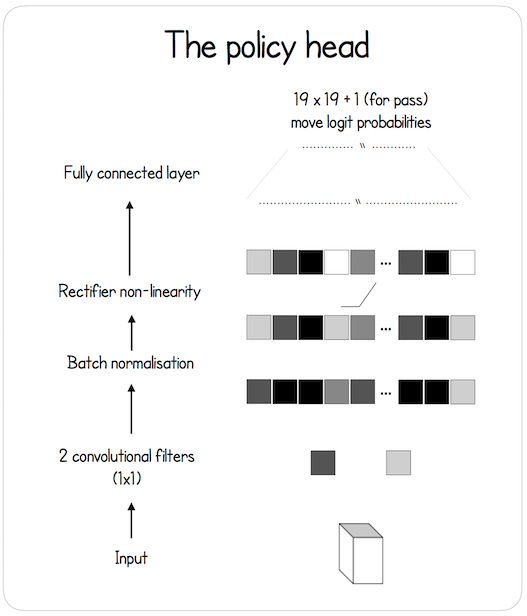
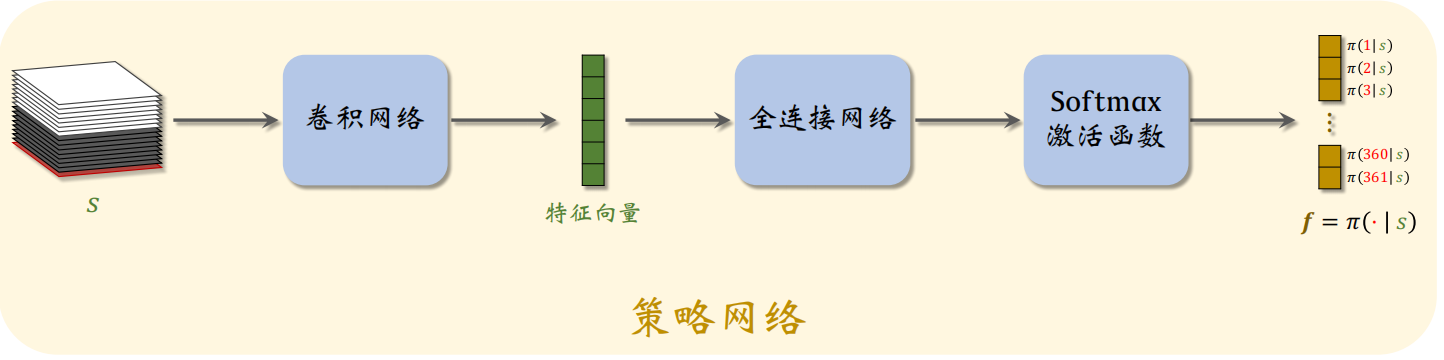
图 2: 策略网络的示意图。
1.3 价值网络
策略网络 $\pi(a \mid s ; \boldsymbol{\theta})$ 的结构如图 $2$ 所示。策略网络的输入是 $19 \times 19 \times 17$ 的状态 $s$ 。 策略网络的输出是 361 维的向量 $\boldsymbol{f}$, 它的每个元素对应一个动作(即在棋盘上一个位置放棋子)。向量 $\boldsymbol{f}$ 所有元素都是正数, 而且相加等于 1 。
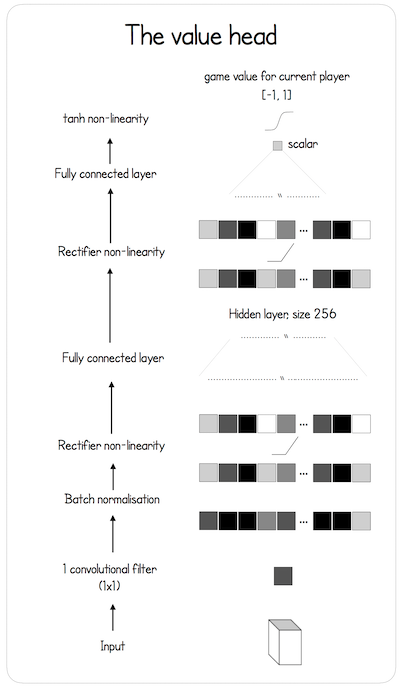
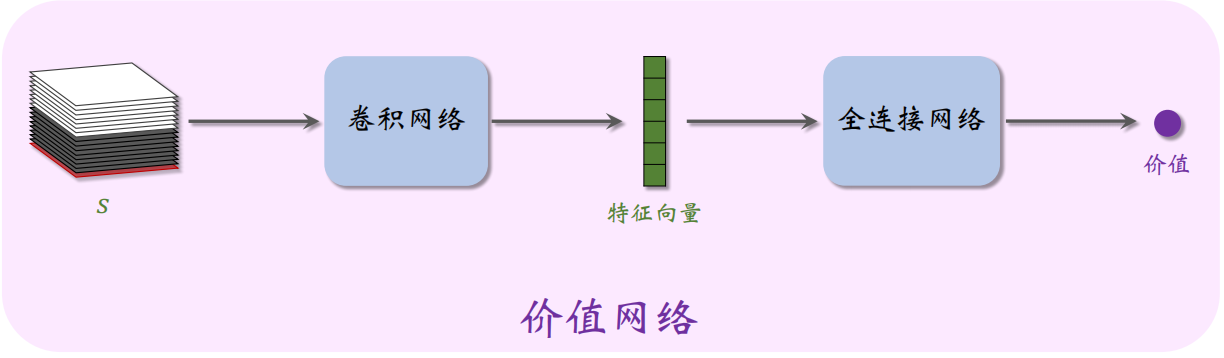
图 3: 价值网络的示意图。
AlphaGo 还有一个价值网络 $v(s ; \boldsymbol{w})$, 它是对状态价值函数 $V_{\pi}(s)$ 的近似。价值网络的结构如图 $3$ 所示。价值网络的输入是 $19 \times 19 \times 17$ 的状态 $s$ 。价值网络的输出是一个实数, 它的大小评价当前状态 $s$ 的好坏
策略网络和价值的输入相同, 都是状态 $s$ 。它们都用多个卷积层把 $s$ 映射到特征向量。因此可以让策略网络和价值网络共用卷积层。训练策略网络和价值网络的方法在之后的第 $3$ 节解释。
2 蒙特卡洛树搜索 (MCTS)
假设此时已经训练好了策略网络 $\pi(a \mid s ; \boldsymbol{\theta})$ 和价值网络 $v(s ; \boldsymbol{w})$ 。AlphaGo 真正跟人下棋的时候, 做决策的不是策略网络或者价值网络, 而是蒙特卡洛树搜索 (Monte Carlo Tree Search), 缩写 MCTS。MCTS 不需要训练, 可以直接做决策。训练策略网络和价值网络的目的是辅助 MCTS。本节中假设策略网络和价值网络已经训练好, 可以直接用; 下一节再具体讲解策略网络和价值网络的训练。
2.1 MCTS 的基本思想
思考一个问题:人类玩家是怎么下围棋、象棋、五子棋的?
人类玩家通常都会向前看几步; 越是高手, 看得越远。假如现在该我放棋子了, 我应该思考这样的问题:当前有几个貌似可行的走法, 假如我的动作是 $a_{t}=234$, 对手会怎么走呢? 假如接下来对手把棋子放在 $a_{t}^{\prime}=30$ 的位置上,那我下一步的动作 $a_{t+1}$ 应该是什么呢? 做当前决策之前, 我需要在大脑里做这样的预判, 确保几步以后我很可能会占优势。如果我只根据当前格局做判断, 不往前看, 我肯定赢不了高手。同理, $\mathrm{AI}$ 下棋也应该向前看, 应该枚举末来可能发生的情况, 从而判断当前执行什么动作的胜算最大; 这样做远好于用策略网络计算一个动作。
$\mathrm{MCTS}$ 的基本原理就是向前看, 模拟末来可能发生的情况, 从而找出当前最优的动作。AlphaGo 每走一步棋, 都要用 MCTS 做成千上万次模拟, 从而判断出哪个动作的胜算最大。做模拟的基本思想如下。假设当前有三种看起来很好的动作。每次模拟的时候从三种动作中选出一种, 然后将一局游戏进行到底, 从而知晓胜负。(只是计算机做模拟而已, 不是真的跟对手下完一局。)重复成千上万次模拟, 统计一下每种动作的胜负频率, 发现三种动作胜率分别是 $48 % 、 56 % 、 52 %$ 。那么 AlphaGo 应当执行第二种动作, 因为它的胜算最大。以上只是 MCTS 的基本想法, 实际做起来有很多难点需要解决。
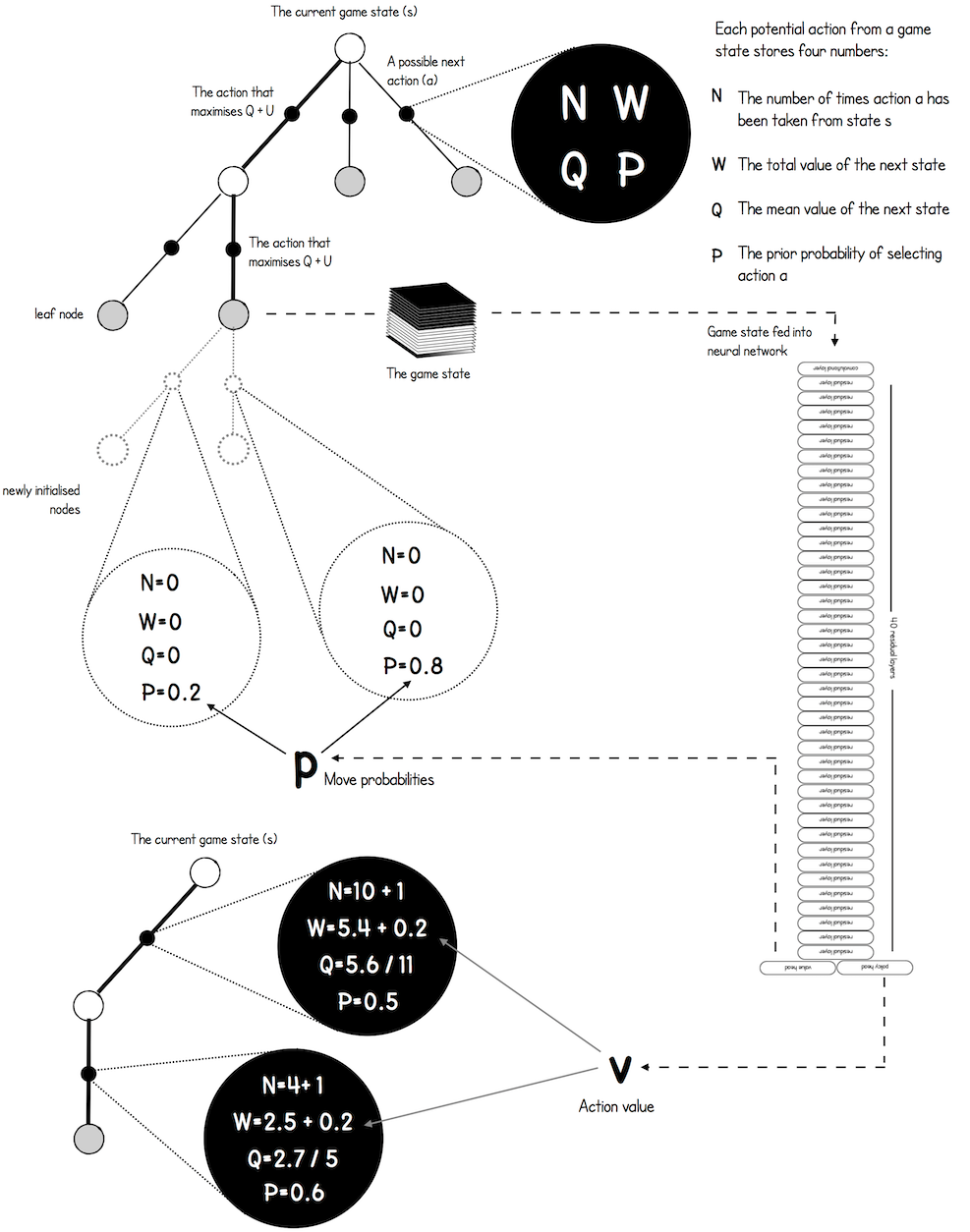
如图所示,在图中的搜索树当中,黑色的点表示的是从一个状态过渡到另一个状态的动作a;其余的节点表示的是棋局的状态,也就是之前所说的输入。从一个非叶子节点的状态开始,往往存在多种可能的行动,而其中的状态节点a具有4种属性,他们决定了到底应该如何选择。具体来讲,其中的N表示的是到目前为止,该动作节点被访问的次数;P表示网络预测出来的选择该节点的概率;W表示下一个状态的总的价值,而价值网络输出的动作的价值会被累及到这个值当中;这个值除以被访问到的次数就等于平均的价值Q。实际上,还会给Q加上一个U来起到探索更多的动作的效果。我想应该是非常清楚的。那么如何根据构建出来的搜索树进行下棋的步骤呢?在一定的阈值范围内(比如说,1000个迭代之前),采用最大化Q函数的方式来选择动作;那么当大于这个阈值之后采用蒙特卡罗搜索树的方式(例如PUCT算法,也就是根据概率和被访问的次数)来选择执行的动作。
2.2 MCTS 的四个步骤
$\mathrm{MCTS}$ 的每一次模拟选出一个动作 $a$, 执行这个动作, 然后把一局游戏进行到底, 用胜负来评价这个动作的好坏。MCTS 的每一次模拟分为四个步骤:选择(selection)、扩 展 (expansion)、求值 (evaluation)、回溯 (backup)。
第一步:选择 (Selection)
观测棋盘上当前的格局, 找出所有空位, 然后判断其中哪些位置符合围棋规则 ; 每个符合规则的位置对应一个可行的动作。每一步至少有几 十、甚至上百个可行的动作; 假如挨个搜索和评估所有可行动作, 计算量会大到无法承受。虽然有几十、上百个可行动作, 好在只有少数几个动作有较高的胜算。第一步选择的目的就是找出胜算较高的动作, 只搜索这些好的动作, 忽略掉其他的动作。
如何判断动作 $a$ 的好坏呢? 有两个指标:第一, 动作 $a$ 的胜率; 第二, 策略网络给动作 $a$ 的评分(概率值)。用下面这个分值评价 $a$ 的好坏:
$$ \operatorname{score}(a) \triangleq Q(a)+\frac{\eta}{1+N(a)} \cdot \pi(a \mid s ; \boldsymbol{\theta}) . $$
此处的 $\eta$ 是个需要调的超参数。公式中 $N(a) 、 Q(a)$ 的定义如下:
$N(a)$ 是动作 $a$ 已经被访问过的次数。初始的时候, 对于所有的 $a$, 令 $N(a) \leftarrow 0$ 。 动作 $a$ 每被选中一次, 我们就把 $N(a)$ 加一:$N(a) \leftarrow N(a)+1$ 。
$Q(a)$ 是之前 $N(a)$ 次模拟算出来的动作价值, 主要由胜率和价值函数决定。 $Q(a)$ 的初始值是 0 ; 动作 $a$ 每被选中一次, 就会更新一次 $Q(a)$; 后面会详解。
可以这样理解公式 (1):
- 如果动作 $a$ 还没被选中过, 那么 $Q(a)$ 和 $N(a)$ 都等于零, 因此可得
$$ \operatorname{score}(a) \propto \pi(a \mid s ; \boldsymbol{\theta}), $$
也就是说完全由策略网络评价动作 $a$ 的好坏。
- 如果动作 $a$ 已经被选中过很多次, 那么 $N(a)$ 就很大, 导致策略网络在 $\operatorname{score}(a)$ 中 的权重降低。当 $N(a)$ 很大的时候, 有
$$ \operatorname{score}(a) \approx Q(a), $$
此时主要基于 $Q(a)$ 判断 $a$ 的好坏, 而策略网络已经无关紧要。
- 系数 $\frac{1}{1+N(a)}$ 的另一个作用是鼓励探索, 也就是让被选中次数少的动作有更多的机会被选中。假如两个动作有相近的 $Q$ 分数和 $\pi$ 分数, 那么被选中次数少的动作的 score 会更高。
MCTS 根据公式 (1) 算 出所有动作的分数 $\operatorname{score}(a), \forall a$ 。 MCTS 选择分数最高的动作。图 $4$ 的例子中有 3 个可行动作, 分数分别为 $0.4 、 0.3 、 0.5$ 。第三个动作分数最高, 会被选中, 这一轮模拟会执行这个动作。(只是在模拟, 不是 AlphaGo 真的走一步棋)
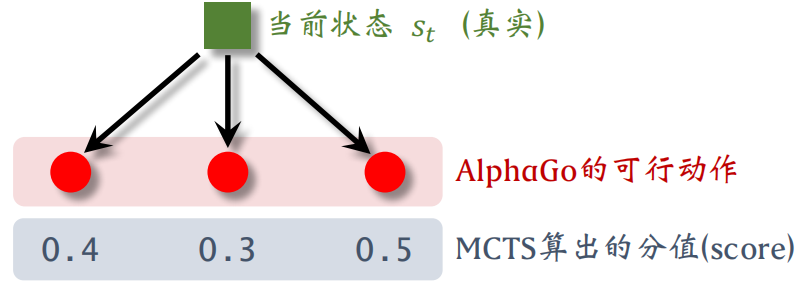
图 4: 假设有 3 个可行动作, 根据公式 (1) 算出它们 的分数。
第二步:扩展 (Expansion)
把第一步选中的动作记作 $a_{t}$, 它只是个假想的动作, 只在“模拟器”中执行, 而不是 AlphaGo 真正执行的动作。AlphaGo 需要考虑这样一个问题:假如它执行动作 $a_{t}$, 那么对手会执行什么动作呢? 对手肯定不会把自己的想法告诉 AlphaGo, 那么 AlphaGo 只能自己猜测对手的动作。AlphaGo 可以“推已及人”: 如果 AlphaGo 认为几个动作很好, 对手也会这么认为。所以 AlphaGo 用策略网络模拟对手, 根据策略网络随机抽样一个动作: $$ a_{t}^{\prime} \sim \pi\left(\cdot \mid s_{t}^{\prime} ; \boldsymbol{\theta}\right) . $$
此处的状态 $s^{\prime}$ 是站在对手的角度观测到的棋盘上的格局, 动作 $a_{t}^{\prime}$ 是(假想)对手选择的动作。图 $5$ 的例子中对手有四种可行动作, AlphaGo 用策略网络算出每个动作的概率值, 然后根据概率值随机抽样一个对手的动作, 记作 $a_{t}^{\prime}$ 。假设根据概率值 $0.1,0.3,0.2$, $0.4$ 做随机抽样, 选中第二种动作; 见图 6。从 AlphaGo 的角度来看, 对手的动作就是 AlphaGo 新的状态。
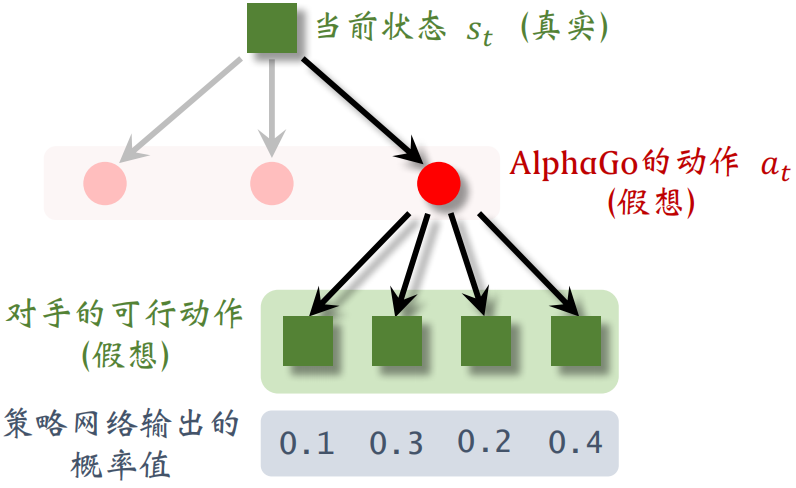
图 5: 假设 AlphaGo 有三种可行的动作,AlphaGo 选中第三个,并在模拟中执行。用策略网络模拟对手,策略网络输出对手可行动作的概率值:0*.1, 0.3, 0.2, 0.*4。
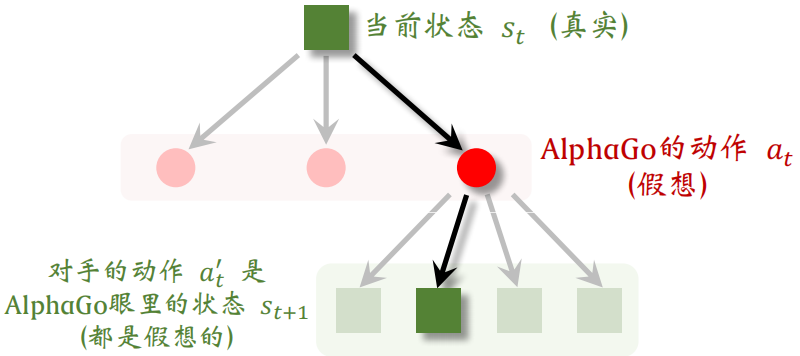
图 6: 假设对手有四种可行的动作,AlphaGo 根据概率值做随机抽样,替对手选中了第二种动作。对手的动作就是 AlphaGo 眼里的新的状态。
AlphaGo 需要在模拟中跟对手将一局游戏进行下去, 所以需要一个模拟器 (即环境) 。在模拟器中, AlphaGo 每执行一个动作 $a_{k}$, 模拟器就会返回一个新的状态 $s_{k+1}$ 。想要搭建一个好的模拟器, 关键在于使用正确的状态转移函数 $p\left(s_{k+1} \mid s_{k}, a_{k}\right)$; 如果状态转移函数与事实偏离太远, 那么用模拟器做 MCTS 是毫无意义的。
AlphaGo 模拟器利用了围棋游戏的对称性:AlphaGo 的策略, 在对手看来是状态转移函数; 对手的策略, 在 AlphaGo 看来是状态转移函数。最理想的情况下, 模拟器的状态转移函数是对手的真实策略;然而 AlphaGo 并不知道对手的真实策略。AlphaGo 退而求其次, 用 AlphaGo 自己训练出的策略网络 $\pi$ 代替对手的策略, 作为模拟器的状态转移函数。
想要用 MCTS 做决策, 必须要有模拟器, 而搭建模拟器的关键在于构造正确的状态转移函数 $p\left(s_{k+1} \mid s_{k}, a_{k}\right)$ 。从搭建模拟器的角度来看, 围棋是非常简单的问题:由于围棋的对称性, 可以用策略网络作为状态转移函数。但是对于大多数的实际问题, 构造状态转移函数是非常困难的。比如机器人、无人车等应用, 状态转移的构造需要物理模型, 要考虑到力、运动、以及外部世界的干扰。如果物理模型不够准确, 导致状态转移函数偏离事实太远, 那么 MCTS 的模拟结果就不可靠。
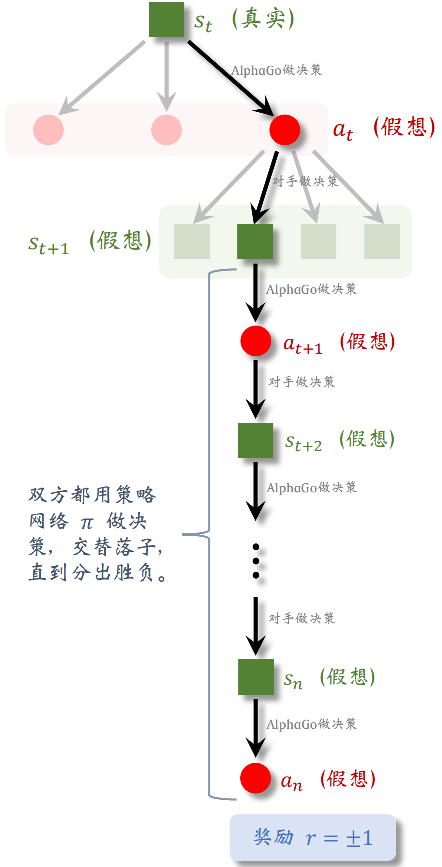
第三步:求值 (Evaluation)
从状态 $s_{t+1}$ 开始, 双方都用策略网络 $\pi$ 做决策, 在模拟器中交替落子, 直到分出胜负; 见图 7。AlphaGo 基于状态 $s_{k}$, 根据策略网络抽样得到动作 $$ a_{k} \sim \pi\left(\cdot \mid s_{k} ; \boldsymbol{\theta}\right) . $$
对手基于状态 $s_{k}^{\prime}$ (从对手角度观测到的棋盘上的格局), 根据策略网络抽样得到动作
$$ a_{k}^{\prime} \sim \pi\left(\cdot \mid s_{k}^{\prime} ; \boldsymbol{\theta}\right) . $$
当这局游戏结束时, 可以观测到奖励 $r$ 。如果 AlphaGo 胜利, 则 $r=+1$, 否则 $r=-1$ 。
回顾一下, 棋盘上真实的状态是 $s_{t}, $ AlphaGo 在模拟器中执行动作 $a_{t}$, 然后模拟器中 的对手执行动作 $a_{t}^{\prime}$, 带来新的状态 $s_{t+1}$ 。状态 $s_{t+1}$ 越好, 则这局游戏胜算越大。
如果 AlphaGo 赢得这局模拟 $(r=+1)$, 则 说明 $s_{t+1}$ 可能很好; 如果输了 $(r=-1)$, 则说明 $s_{t+1}$ 可能不好。因此, 奖励 $r$ 可 以反映出 $s_{t+1}$ 的好坏。
此外, 还可以用价值网络 $v$ 评价状态 $s_{t+1}$ 的好坏。价值 $v\left(s_{t+1} ; \boldsymbol{w}\right)$ 越大, 则说明状 态 $s_{t+1}$ 越好。
奖励 $r$ 是模拟获得的胜负, 是对 $s_{t+1}$ 很可靠的评价, 但是随机性太大。价值网络的评估 $v\left(s_{t+1} ; \boldsymbol{w}\right)$ 没有 $r$ 可靠, 但是价值网络更稳定、 随机性小。AlphaGo 的解决方案是把奖励 $r$ 与 价值网络的输出 $v\left(s_{t+1} ; \boldsymbol{w}\right)$ 取平均, 记作:
$$ V\left(s_{t+1}\right) \triangleq \frac{r+v\left(s_{t+1} ; \boldsymbol{w}\right)}{2}, $$
把它记录下来, 作为对状态 $s_{t+1}$ 的评价。
实际实现的时候, AlphaGo 还训练了一个更小的神经网络, 它做决策更快。MCTS 在第一步和第二步用大的策略网络, 第三步用小的策略网络。 读者可能好奇, 为什么在且仅在第三步用小的策略网络呢? 第三步两个策略网络交替落子, 通常要走一两百步, 导致第三步成为 MCTS 的瓶颈。用小的策略网络代替大的策略网络, 可以大幅加速 MCTS。
第四步:回溯(Backup)
在第三步求值过程中算出了第 $t+1$ 步某一个状态的价值,记作 $V\left(s_{t+1}\right)$ ;每一次模拟都会得出这样一个价值, 并且 记录下来。模拟会重复很多次, 于是 第 $t+1$ 步每一种状态下面可以有多条记录; 如图 $8$ 所示。第 $t$ 步的动作 $a_{t}$ 下面有多个可能的状态(子节点)每个状态下面有若干条记录。把 $a_{t}$ 下面所有的记录取平均, 记作价值 $Q\left(a_{t}\right)$, 它可以反映出动作 $a_{t}$ 的好坏。在图 $8$ 中, $a_{t}$ 下面一共有 12 条记录, $Q\left(a_{t}\right)$ 是 12 条记录的均值。
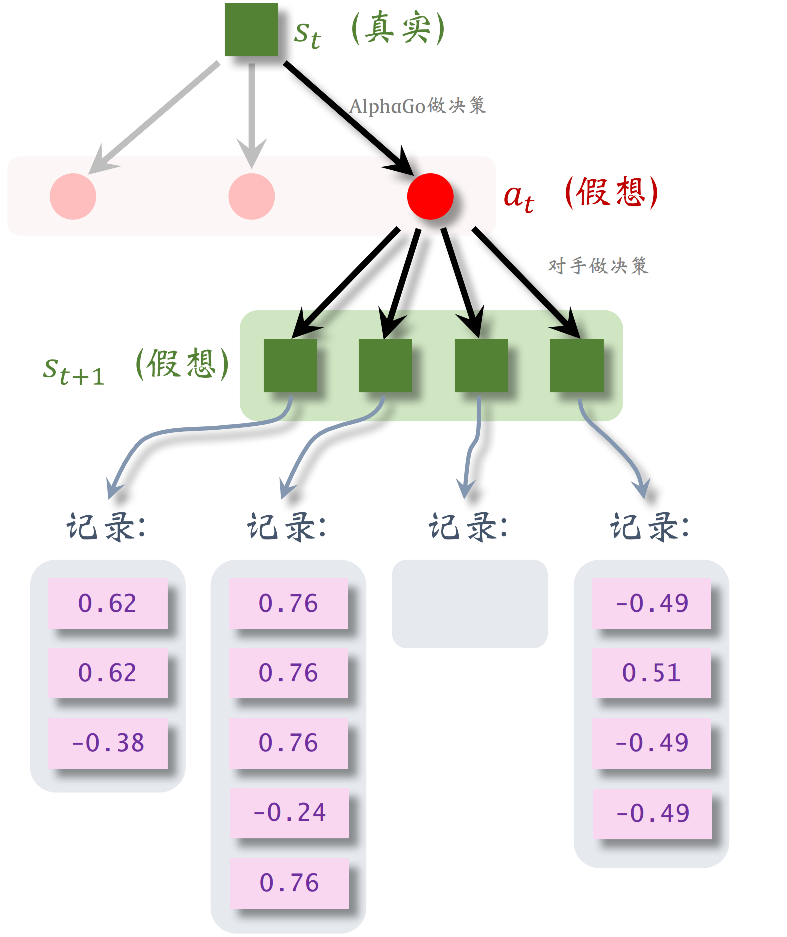
图 8: 每一个状态 $s_{t+1}$ 下面都有很多条记录, 每一 条记录是一个 $V\left(s_{t+1}\right)$ 。
给定棋盘上的真实状态 $s_{t}$, 有多个动作 $a$ 可供选择。对于所有的 $a$, 价值 $Q(a)$ 的初始值是零。动作 $a$ 每被选中一次 (成为 $a_{t}$ ), 它下面就会多一条记录, 我们就对 $Q(a)$ 做 一次更新。
回顾第一步一选择 (Selection) : 基于棋盘上真实的状态 $s_{t}$, MCTS 需要从可行的动作中选出一个, 作为 $a_{t}$ 。MCTS 计算每一个动作 $a$ 的分数:
$$ \operatorname{score}(a) \triangleq Q(a)+\frac{\eta}{1+N(a)} \cdot \pi(a \mid s ; \boldsymbol{\theta}), \quad \forall a, $$
然后选择分数最高的 $a$ 。MCTS 算出的 $Q(a)$ 的用途就是这里。
2.3 MCTS 的决策
上一小节讲解了单次模拟的四个步骤, 注意, 这只是单次模拟而已。MCTS 想要真正做出一个决策 (即往真正的棋盘上落一个棋子), 需要做成千上万次模拟。在做了无数次模拟之后, MCTS 做出真正的决策:
$$ a_{t}=\underset{a}{\operatorname{argmax} } N(a) . $$
此时 AlphaGo 才会真正往棋盘上放一个棋子。
为什么要依据 $N(a)$ 来做决策呢? 在每一次模拟中, $\operatorname{MCTS}$ 找出所有可行的动作 ${a}$, 计算它们的分数 $\operatorname{score}(a)$, 然后选择其中分数最高的动作, 然后在模拟器里执行。如果某个动作 $a$ 在模拟中胜率很大, 那么它的价值 $Q(a)$ 就会很大, 它的分数 $\operatorname{score}(a)$ 会很高, 于是它被选中的几率就大。也就是说如果某个动作 $a$ 很好, 它被选中的次数 $N(a)$ 就会大。
观测到棋盘上当前状态 $s_{t}$, MCTS 做成千上万次模拟, 记录每个动作 $a$ 被选中的次数 $N(a)$, 最终做出决策 $a_{t}=\operatorname{argmax}{a} N(a)$ 。到了下一时刻, 状态变成了 $s$, MCTS 把所有动作 $a$ 的 $Q(a) 、 N(a)$ 全都初始化为零, 然后从头开始做模拟, 而不能利用上一 次的结果。
AlphaGo 下棋非常“暴力”: 每走一步棋之前, 它先在“脑海里”模拟几千、几万局, 它可以预知它每一种动作带来的后果, 对手最有可能做出的反应都在 AlphaGo 的算计之内。 由于计算量差距悬殊, 人类面对 AlphaGo 时不太可能有胜算。这样的比赛对人来说是不公平的; 假如李世石下每一颗棋子之前, 先跟柯洁模拟一千局, 或许李世石的胜算会大于 AlphaGo。
3. 训练策略网络和价值网络
上一节假设策略网络和价值网络已经训练好, 并且用策略网络和价值网络辅助 MCTS。 本节具体讲解如何训练两个神经网络。AlphaGo 有多个版本, 其中最著名的是 2016、2017 年发表在 Nature 期刊的两个版本, 本篇称之为 2016 版和 AlphaGo Zero 版。AlphaGo Zero 实力更强:DeepMind 做了实验, 让两个版本博弈 100 次, 比分是 $100: 0$ 。
AlphaGo 2016 版本的训练
AlphaGo 2016 版的训练分为三步:第一, 随机初始化策略网络 $\pi(a \mid s ; \boldsymbol{\theta})$ 之后, 用行为克隆 (behavior cloning) 从人类棋谱中学习策略网络; 第二, 让两个策略网络自我博弈, 用 REINFORCE 算法改进策略网络; 第三, 基于已经训练好的策略网络, 训练价值网络 $v(s ; \boldsymbol{w})$ 。
第一步: 行为克隆
一开始的时候, 策略网络的参数都是随机初始化的。假如此时直接让两个策略网络自我博弈, 它们会做出纯随机的动作。它们得随机摸索很多很多次, 才能做出合理的动作。假如一上来就用 REINFORCE 学习策略网络, 最初随机摸索的过程要花很久。这就是为什么 AlphaGo 2016 版基于人类专家的知识初步训练一个策略网络。
有一个叫 KGS 的在线围棋游戏程序, 它在 2000 年的时候上线, 让玩家在线比赛。 KGS 会把每一局游戏都记录下来。KGS 有 16 万局是六段以上的高级玩家的记录。每一局游戏有很多步, 每一步棋盘上的格局作为一个状态 $s_{k}$, 下一个棋子的位置作为动作 $a_{k}$, 这样得到数据集 $\left{\left(s_{k}, a_{k}\right)\right}$ 。数据集中一共有 $m=2.94 \times 10^{7}$ 个 $\left(s_{k}, a_{k}\right)$ 这样的二元组。
AlphaGo 用行为克隆训练策略网络 $\pi(a \mid s ; \boldsymbol{\theta})$ 。之前第 $12.1$ 节详细介绍了行为克隆, 这里只是简单概括一下。设 361 维的向量
$$ \boldsymbol{f}{k}=\pi\left(\cdot \mid s ; \boldsymbol{\theta}\right)=\left[\pi\left(1 \mid s_{k} ; \boldsymbol{\theta}\right), \pi\left(2 \mid s_{k} ; \boldsymbol{\theta}\right), \cdots \pi\left(361 \mid s_{k} ; \boldsymbol{\theta}\right)\right] $$
是策略网络的输出, 设 $\overline{\boldsymbol{a} }{k}$ 是对动作 $a$ 的 one-hot 编码。函数 $H\left(\overline{\boldsymbol{a} }{k}, \boldsymbol{f}\right)$ 是交叉熵 (cross entropy), 衡量 $\overline{\boldsymbol{a} }{k}$ 与 $\boldsymbol{f}$ 的差别。行为克隆可以描述成这样一个优化问题:
$$ \min {\boldsymbol{\theta} } \frac{1}{m} \sum^{m} H\left(\overline{\boldsymbol{a} }{k}, \boldsymbol{f}\right) . $$
可以用随机梯度下降 (SGD) 求解这个优化问题。每次随机从 ${1, \cdots, m}$ 中选出一个序 号, 记作 $j$ 。设当前策略网络参数为 $\boldsymbol{\theta}_{\text {now } }$ 用随机梯度更新 $\boldsymbol{\theta}$ :
$$ \boldsymbol{\theta}{\text {new } } \leftarrow \boldsymbol{\theta}{\text {now } }-\beta \cdot \nabla_{\boldsymbol{\theta} } H\left(\overline{\boldsymbol{a} }{j}, \pi\left(\cdot \mid s ; \boldsymbol{\theta}_{\text {now } }\right)\right) . $$
此处的 $\beta$ 是学习率。这样可以让策略网络的决策 $\pi\left(\cdot \mid s_{k} ; \boldsymbol{\theta}\right)$ 更接近人类高手的动作 $\overline{\boldsymbol{a} }_{j}$ 。
KGS 中的 16 万局游戏都是六段以上的高手的博弈。行为克隆得到的策略网络模仿高手的动作, 可以做出比较合理的决策。它在实战中可以打败业余玩家, 但是打不过职业玩家。第 $12.1$ 节详细讨论过行为克隆的缺点。为了克服行为克隆的缺点, 还需要继续用强化学习训练策略网络。在行为克隆之后再做强化学习改进策略网络, 可以击败只用行为克隆的策略网络, 胜算是 $80 %$ 。
第二步: 用 REINFORCE 训练策略网络
AlphaGo 让策略网络做自我博弈, 用胜负作为奖励, 更新策略网络。博弈的双方是两个策略网络, 一个叫做 “玩家”,用最新的参数, 记作 $\boldsymbol{\theta}{\text {now } }$; 另一个叫做 “对手”, 它的参数是从过时的参数中随机选出来的,记作 $\boldsymbol{\theta}{\text {old } }$。“对手”的作用相当于模拟器(环境)的状态转移函数,只是陪玩。训练的过程中,只更新“玩家”的参数,不更新“对手”的参数.
让“玩家”和“对手”博弈, 将一局游戏进行到底, 假设走了 $n$ 步。游戏没结束的时候, 奖励全都是零:
$$ r_{1}=r_{2}=\cdots=r_{n-1}=0 . $$
游戏结束的时候, 如果 “玩家”赢了, 奖励是 $r_{n}=+1$, 那么所有的回报都是 $+1: 1$
$$ u_{1}=u_{2}=\cdots=u_{n}=+1 \text {. } $$
如果 “玩家”输了, 奖励是 $r_{n}=-1$, 那么所有的回报都是 $-1$ :
$$ u_{1}=u_{2}=\cdots=u_{n}=-1 . $$
所有 $n$ 步都用同样的回报, 这相当于不区分哪一步棋走得好, 哪一步走得烂; 只要赢了, 每一步都被视为“好棋”; 假如输了,每一步都被看成“臭棋”。
REINFORCE 是一种策略梯度方法, 它用观测到的回报 $u$ 近似动作价值 $Q_{\pi}$ 。REINFORCE 更新策略网络的公式是:
$$ \boldsymbol{\theta}{\text {new } } \leftarrow \boldsymbol{\theta}{\text {now } }+\beta \cdot \sum_{t=1}^{n} u_{t} \cdot \nabla \ln \pi\left(a_{t} \mid s_{t} ; \boldsymbol{\theta}_{\text {now } }\right) . $$
此处的 $\beta$ 是学习率。
第三步: 训练价值网络
价值网络 $v(s ; \boldsymbol{w})$ 是对状态价值函数 $V_{\pi}(s)$ 的近似, 用于评估状态 $s$ 的好坏。在完成第二步:训练策略网络 $\pi$-之后, 用 $\pi$ 辅助训练 $v$ 。虽然此处有一个策略网络 $\pi$ 和一个价值网络 $v$, 但这不属于 actor-critic 方法。此处先训练 $\pi$, 再训练 $v$, 用 $\pi$ 辅助训练 $v$; 而 actor-critic 则是同时训练 $\pi$ 和 $v$, 用 $v$ 辅助训练 $\pi$ 。
让训练好的策略网络做自我博弈, 记录状态一回报二元组 $\left(s_{k}, u_{k}\right)$, 存到一个数组里。 自我博弈需要重复非常多次, 把最终得到的数据集记作 $\left{\left(s_{k}, u_{k}\right)\right}{k=1}^{m}$ 。根据定义, 状态 价值 $V{\pi}\left(s_{k}\right)$ 是回报 $U_{k}$ 的期望:
$$ V_{\pi}\left(s_{k}\right)=\mathbb{E}\left[U_{k} \mid S_{k}=s_{k}\right] . $$
我们希望价值网络 $v\left(s_{k} ; \boldsymbol{w}\right)$ 接近 $V_{\pi}$, 也就是回报的期望, 于是让 $v\left(s_{k} ; \boldsymbol{w}\right)$ 去拟合回报 $u_{k}$ 。定义回归问题 (regression):
回报的定义是 $u_{t}=r_{t}+r_{t+1}+\cdots+r_{n}$, 折扣率是 $\gamma=1$ 。
$$ \min {\boldsymbol{w} } \frac{1}{2 m} \sum^{m}\left[v\left(s_{k} ; \boldsymbol{w}\right)-u_{k}\right]^{2} . $$
可以用随机梯度下降 (SGD) 求解这个回归问题。设当前价值网络参数为 $\boldsymbol{w}{\text {now } }$ 每次随机 从 ${1, \cdots, m}$ 中选出一个序号, 记作 $j$ 。用价值网络做预测: $\widehat{v}=v\left(s_{j} ; \boldsymbol{w}_{\text {now } }\right)$ 。用随机 梯度更新 $\boldsymbol{w}$ :
$$ \boldsymbol{w}{\text {new } } \leftarrow \boldsymbol{w}{\text {now } }-\alpha \cdot\left(\widehat{v}{j}-u\right) \cdot \nabla_{\boldsymbol{w} } v\left(s_{j} ; \boldsymbol{w}_{\text {now } }\right) $$
此处的 $\alpha$ 是学习率。
AlphaGo Zero 版本的训练
AlphaGo Zero 与 2016 版本的最大区别在于训练策略网络 $\pi(a \mid s ; \boldsymbol{\theta})$ 方式。训练 $\pi$ 的 时候, 不再从人类棋谱学习, 也不用 REINFORCE 方法, 而是向 MCTS 学习。其实可以把 AlphaGo Zero 训练 $\pi$ 的方法看做是模仿学习, 被模仿对象是 MCTS。
1. 自我博弈
用 MCTS 控制两个玩家对弈。每走一步棋, MCTS 需要做成千上万次模拟, 并记录下每个动作被选中的次数 $N(a), \forall a \in{1,2, \cdots, 361}$ 。设当前是 $t$ 时刻, 真实棋盘上当前状态是 $s_{t}$ 。现在执行 MCTS, 完成很多次模拟, 得到 361 个整数(每种动作被选中的次数): $$ N(1), \quad N(2), \cdots, N(361) \text {. } $$
对这些 $N$ 做归一化, 得到的 361 个正数, 它们相加等于 1 ; 把这 361 个数记作 361 维的向量:
$$ \boldsymbol{p}_{t}=\text { normalize }\left([N(1), N(2), \cdots, N(361)]^{T}\right) . $$
设这局游戏走了 $n$ 步之后游戏分出胜负; 奖励 $r_{n}$ 要么等于 $+1$, 要么等于 $-1$, 取决于游戏的胜负。在游戏结束的时候, 得到回报 $u_{1}=\cdots=u_{n}=r_{n}$ 。记录下这些数据:
$$ \left(s_{1}, \boldsymbol{p}{1}, u\right), \quad\left(s_{2}, \boldsymbol{p}{2}, u\right), \quad \cdots, \quad\left(s_{n}, \boldsymbol{p}{n}, u\right) . $$
用这些数据更新策略网络 $\pi$ 和价值网络 $v$; 对 $\pi$ 和 $v$ 的更新同时进行。
2. 更新策略网络
上一节讨论过, MCTS 做出的决策优于策略网络 $\pi$ 的决策, 这就是为什么 AlphaGo 用 MCTS 做决策, 而 $\pi$ 只是用来辅助 MCTS。既然 MCTS 比 $\pi$ 更好, 那么可以把 MCTS 的决策作为目标, 让 $\pi$ 去模仿。这其实是行为克隆, 被模仿的对象是 MCTS。我们希望 $\pi$ 做出的决策 $$ \boldsymbol{f}{t}=\pi\left(\cdot \mid s ; \boldsymbol{\theta}\right) \in \mathbb{R}^{361} $$
尽量接近 $\boldsymbol{p}{t} \in \mathbb{R}^{361}$, 也就是让交叉熵 $H\left(\boldsymbol{p}, \boldsymbol{f}_{t}\right)$ 尽量小。定义优化问题:
$$ \min {\boldsymbol{\theta} } \frac{1}{n} \sum^{n} H\left(\boldsymbol{p}{t}, \pi\left(\cdot \mid s \boldsymbol{\theta}\right)\right) \text {. } $$
设 $\pi$ 当前参数是 $\boldsymbol{\theta}_{\text {now } }$ 。做一次梯度下降更新参数:
$$ \boldsymbol{\theta}{\text {new } } \leftarrow \boldsymbol{\theta}{\text {now } }-\beta \cdot \frac{1}{n} \sum_{t=1}^{n} \nabla_{\boldsymbol{\theta} } H\left(\boldsymbol{p}{t}, \pi\left(\cdot \mid s \boldsymbol{\theta}_{\text {now } }\right)\right) \text {. } $$
此处的 $\beta$ 是学习率。
3. 更新价值网络
训练价值网络的方法与 AlphaGo 2016 版本基本一样,都是让 $v\left(s_{t} ; \boldsymbol{w}\right)$ 拟合回报 $u_{t}$ 。定义回归问题: $$ \min {\boldsymbol{w} } \frac{1}{2 n} \sum^{n}\left[v\left(s_{t} ; \boldsymbol{w}\right)-u_{t}\right]^{2} . $$
设价值网络 $v$ 当前参数是 $\boldsymbol{w}{\text {now } }$ 用价值网络做预测: $\widehat{v}=v\left(s_{t} ; \boldsymbol{w}_{\text {now } }\right), \forall t=1, \cdots, n$ 。做 一次梯度下降更新 $\boldsymbol{w}$ :
$$ \boldsymbol{w}{\text {new } } \leftarrow \boldsymbol{w}{\text {now } }-\alpha \cdot \frac{1}{n} \sum_{t=1}^{n}\left(\widehat{v}{t}-u\right) \cdot \nabla_{\boldsymbol{w} } v\left(s_{t} ; \boldsymbol{w}_{\text {now } }\right) . $$
训练流程 : 随机初始化策略网络参数 $\boldsymbol{\theta}$ 和价值网络参数 $\boldsymbol{w}$ 。然后让 MCTS 自我博弈, 玩很多局游戏; 每完成一局游戏, 更新一次 $\boldsymbol{\theta}$ 和 $\boldsymbol{w}$ 。训练的具体流程就是重复下面 三个步骤直到收敛:
- 让 $\mathrm{MCTS}$ 自我博弈, 完成一局游戏, 收集到 $n$ 个三元组: $\left(s_{1}, \boldsymbol{p}{1}, u\right), \cdots,\left(s_{n}, \boldsymbol{p}{n}, u\right)$ 。
- 按照公式 (2) 做一次梯度下降, 更新策略网络参数 $\boldsymbol{\theta}$ 。
- 按照公式 (3) 做一次梯度下降, 更新价值网络参数 $\boldsymbol{w}$ 。
相关思考
1. 为什么 AlphaGoZero 更好
蒙特卡洛搜索树为训练提供了稳定的梯度
策略网络和价值网络共享参数,使用 Multi-task 的方式学习,防止了过拟合
2. 使用哪个模型来生成self-play数据?
在AlphaGo Zero版本中,我们需要同时保存当前最新的模型和通过评估得到的历史最优的模型,self-play数据始终由最优模型生成,用于不断训练更新当前最新的模型,然后每隔一段时间评估当前最新模型和最优模型的优劣,决定是否更新历史最优模型。而到了AlphaZero版本中,这一过程得到简化,我们只保存当前最新模型,self-play数据直接由当前最新模型生成,并用于训练更新自身。直观上我们可能会感觉使用当前最优模型生成的self-play数据可能质量更高,收敛更好,但是在尝试过两种方案之后,我们发现,在6*6棋盘上下4子棋这种情况下,直接使用最新模型生成self-play数据训练的话大约500局之后就能得到比较好的模型了,而不断维护最优模型并由最优模型生成self-play数据的话大约需要1500局之后才能达到类似的效果,这和AlphaZero论文中训练34小时的AlphaZero胜过训练72小时的AlphaGo Zero的结果也是吻合的。个人猜测,不断使用最新模型来生成self-play数据可能也是一个比较有效的exploration手段,首先当前最新模型相比于历史最优模型一般不会差很多,所以对局数据的质量其实也是比较有保证的,同时模型的不断变化使得我们能覆盖到更多典型的数据,从而加快收敛。
3. 如何保证self-play生成的数据具有多样性?
一个有效的策略价值模型,需要在各种局面下都能比较准确的评估当前局面的优劣以及当前局面下各个action的相对优劣,要训练出这样的策略价值模型,就需要在self-play的过程中尽可能的覆盖到各种各样的局面。前面提到,不断使用最新的模型来生成self-play数据可能在一定程度上有助于覆盖到更多的局面,但仅靠这么一点模型的差异是不够的,所以在强化学习算法中,一般都会有特意设计的exploration的手段,这是至关重要的。在AlphaGo Zero论文中,每一个self-play对局的前30步,action是根据正比于MCTS根节点处每个分支的访问次数的概率采样得到的,而之后的exploration则是通过直接加上Dirichlet noise的方式实现的。
4. self-play数据的扩充
围棋具有旋转和镜像翻转等价的性质,其实五子棋也具有同样的性质。在AlphaGo Zero中,这一性质被充分的利用来扩充self-play数据,以及在MCTS评估叶子节点的时候提高局面评估的可靠性。但是在AlphaZero中,因为要同时考虑国际象棋和将棋这两种不满足旋转等价性质的棋类,所以对于围棋也没有利用这个性质。而在我们的实现中,因为生成self-play数据本身就是计算的瓶颈,为了能够在算力非常弱的情况下尽快的收集数据训练模型,每一局self-play结束后,我们会把这一局的数据进行旋转和镜像翻转,将8种等价情况的数据全部存入self-play的data buffer中。这种旋转和翻转的数据扩充在一定程度上也能提高self-play数据的多样性和均衡性。
5. 训练好的Alpha Zero如何进行对弈?
评估器的落子过程即最终对弈时的落子过程(自对弈中的落子就是真实最终对局时的落子方式):使用神经网络的输出 p 作为先验概率进行MCTS搜索,每步1600次(最后应用的版本可能和每一步的给的时间有关)模拟,前30步采样落子,剩下棋局使用最多访问次数来落子,得到 π ,然后选择落子策略中最大的一个位置落子.
相关文献
早在很多年前, $\mathrm{AI}$ 就在棋类游戏中战胜了人类, 比如国际象棋 (Chess) ${ }^{[23]}$, 西洋 跳棋 (Checker ${ }^{[92,91]}$, 黑白棋(Reversi 或 Othello) ${ }^{[21]}$, 双陆棋(Backgammon) ${ }^{[110]} 。$ 这些棋类游戏的状态空间远比围棋的状态空间小,所以做搜索会相对比较容易。
AlphaGo 的论文首先发表在 Nature 2016 ${ }^{[98]}$ 。改进版本 AlphaGo Zero 发表在 Nature $2017^{[100]}$ 。在 AlphaGo 之前一直有对围棋 AI 的探索, 尽管 AI 尚无法击败人类围棋冠军。其中最有名的围棋 AI 包括 Pachi $^{[10]}$, Fuego ${ }^{[35]}$, GNU Go (1999 年发布, 2009 年停 更), Crazy Stone (2006 年发布)。Crazy Stone 虽然不及人类冠军, 但是在对手让 4 子的 情况下打败过 9 段高手。有兴趣的读者可以参考这些论文: $[4,79,114,17,32,35,10]$ 。
蒙特卡洛树搜索 (MCTS) 的名字最早在 2006 年发表的论文 ${ }^{[31]}$ 中提出。另外两篇 2006 年的论文 ${ }^{[25,59]}$ 提出了类似的想法。2008 年发表的论文 ${ }^{[24]}$ 将 MCTS 概括为今天我们众所周知的四个步骤。本篇篇幅有限, 不深入介绍 MCTS。有兴趣的读者可以阅读 综述 ${ }^{[20]}$ 和书 ${ }^{[26]}$ 。
知识点
AlphaGo 2016 版本的训练分三步。首先做行为克隆, 用人类高手的棋谱训练策略网 络。然后让两个策略网络自我博弈, 用 REINFORCE 算法进一步训练策略网络。最 后做回归训练价值网络, 价值网络可以根据棋盘上的格局预估胜算。
新版的 AlphaGo Zero 用蒙特卡洛树搜索(MCTS)控制两个玩家博弈。每完成一 局, 对策略网络和价值网络做一次更新。用行为克隆训练策略网络, 模仿的对象是 MCTS 的决策。用回归训练价值网络, 让价值网络拟合胜负关系。
训练好策略网络和价值网络之后, AlphaGo 可以与人类高手对决。AlphaGo 使用 MCTS 做决策, MCTS 需要策略网络和价值网络的辅助。策略网络扮演模拟器中的 玩家和对手。价值网络的作用是给棋盘上的格局打分,从而估算动作的好坏。
MCTS 分四步:选择、扩展、求值、回溯。在模拟器中执行这四步, 可以计算出一个动作的一个分数。需要重复这四步成千上万次, 可以从动作的分数中看出动作的 好坏。实际执行最好的动作, 在棋盘上落一颗棋子。每在棋盘上落一颗子, 都需要 从头开始做 MCTS, 重复成千上万次模拟。
习题
AlphaGo 用 MCTS 来判断动作的好坏。通过计算, MCTS 发现动作 $a$ 的分数 $N(a)$ 很高, 这说明 A. 动作 $a$ 好 B. 动作 $a$ 不好
AlphaGo 中的价值网络 $v(s ; \boldsymbol{w})$ 是对 的近似。 A. 动作价值函数 $Q_{\pi}$ B. 最优动作价值函数 $Q_{\star}$ C. 状态价值函数 $V_{\pi}$ D. 最优状态价值函数 $V_{\star}$