PyTorch 分布式训练详解
PyTorch 的分布式计算能力核心在于 torch.distributed 包,其底层基于 Collective Communication(c10d)库实现高效的跨进程张量通信。本文将深入剖析分布式数据并行训练(DDP)的通信机制、环境配置、核心概念及底层通信原语,帮助读者高效地应用 PyTorch 进行大规模模型训练。
1. 核心通信机制
PyTorch 的分布式通信主要依赖 torch.distributed 包,它支持以下两类通信 API:
- 集合通信(Collective Communication APIs):用于所有进程之间进行协调和数据交换,是分布式数据并行训练(Distributed Data-Parallel,DDP)的核心支撑。
- 点对点通信(P2P Communication APIs):用于两个指定进程之间进行直接数据传输,是基于 RPC 的分布式训练(RPC-Based Distributed Training)的基础。
本教程侧重于分布式数据并行训练(DDP)的通信机制与 API 使用。
2. 分布式训练基础模板
torch.distributed 包通过消息传递语义(Message Passing Semantics)将计算任务并行化到多个进程,支持单机多卡和多机集群环境。这与仅支持单机多进程的 torch.multiprocessing 包有本质区别——分布式包支持跨机器通信,并可选择多种通信后端。
2.1 单节点多进程训练模板
以下是一个基础的分布式训练模板,用于在单机上启动多个训练进程。
该模板通过 torch.multiprocessing 启动 2 个独立的进程,每个进程都完成分布式环境配置和进程组初始化,随后执行训练函数 run。
"""run.py: 基础分布式启动脚本"""
import os
import torch.distributed as dist
import torch.multiprocessing as mp
def run(rank: int, world_size: int):
"""
具体的分布式训练逻辑实现函数。
:param rank: 当前进程的唯一标识(0 到 world_size-1)。
:param world_size: 参与训练的总进程数。
"""
# 核心训练逻辑在此处实现
print(f"进程 {rank} 已启动,总进程数:{world_size}")
# 示例:执行一个 barrier 同步操作
dist.barrier()
print(f"进程 {rank} 同步完成。")
def init_process(rank: int, world_size: int, fn, backend: str = "gloo"):
"""
初始化分布式环境(进程组)。
"""
# 使用环境变量方式协调进程,这是 torch.distributed 推荐的方式
os.environ["MASTER_ADDR"] = "127.0.0.1" # 主节点 IP 地址
os.environ["MASTER_PORT"] = "29500" # 主节点通信端口
# 初始化进程组
dist.init_process_group(backend, rank=rank, world_size=world_size)
fn(rank, world_size) # 执行训练函数
if __name__ == "__main__":
world_size = 2 # 总进程数
mp.set_start_method("spawn") # 使用 spawn 启动方法
processes = []
for rank in range(world_size):
# 为每个 rank 启动一个独立的进程
p = mp.Process(target=init_process, args=(rank, world_size, run))
p.start()
processes.append(p)
for p in processes:
p.join() # 阻塞主进程直到所有子进程结束
dist.destroy_process_group() # 清理资源(如果不在子进程内调用)执行流程分析:
- 环境配置与进程组初始化(
dist.init_process_group) - 分布式训练函数执行
- 进程同步与资源清理
3. 核心概念解析
3.1 DDP vs. DataParallel
在实践中,我们通常选择 torch.nn.parallel.DistributedDataParallel(DDP) 而非 torch.nn.DataParallel(DP),原因在于 DDP 在性能和扩展性上具有显著优势。
| 特性 | torch.nn.DataParallel(DP) | torch.nn.parallel.DistributedDataParallel(DDP) |
|---|---|---|
| 进程模型 | 单进程多线程(主从结构) | 多进程(对等结构) |
| 适用范围 | 仅支持单机多卡 | 支持单机和多机 |
| 通信机制 | 基于线程的张量拷贝和广播 | 基于集合通信的梯度同步 |
| 性能瓶颈 | 受 Python GIL 限制,主 GPU 负载高,通信开销大 | 无 GIL 限制,负载均衡,通信开销更小 |
| 内存/优化器 | 所有 GPU 共享一个 Python 解释器和优化器 | 每个进程(通常对应一个 GPU)拥有独立的解释器和优化器 |
| 扩展性 | 不支持与模型并行结合 | 支持与模型并行结合使用 |
3.2 DDP 核心优势
- 性能优化:多进程架构消除 GIL 瓶颈,显著提升计算密集型任务性能。
- 通信效率:梯度同步通过高效的集合通信(如 All-Reduce)实现,避免额外的参数广播步骤,降低通信开销。
- 扩展能力:支持模型并行与数据并行混合策略,可处理超大规模模型。
4. torch.distributed 通信后端
PyTorch 分布式包的一大优势是其抽象设计,允许用户根据硬件和场景选择最合适的通信后端。主要实现的后端包括 Gloo、NCCL 和 MPI。
4.1 通信后端
4.1.1 NCCL 后端
- GPU 优化:专为 NVIDIA GPU 设计的集合通信库。
- 性能领先:在 GPU 上提供最优通信性能。
- 原生支持:集成于 CUDA 版本的 PyTorch。
4.1.2 Gloo 后端
- CPU 通信:完整支持点对点与集合通信。
- GPU 通信:支持集合通信,但性能逊于 NCCL。
- 适用场景:CPU 训练或 GPU 训练的回退方案。
4.1.3 MPI 后端
- 标准化实现:基于消息传递接口标准。
- 高性能计算:在大规模集群上经过深度优化。
- 高级特性:部分实现支持 CUDA IPC 和 GPUDirect 技术。
| 后端 | 适用场景 | 优势 | 劣势/限制 |
|---|---|---|---|
| NCCL | GPU 训练(推荐) | 为 CUDA 张量提供高度优化的集合通信,性能最佳。 | 仅支持集合通信,通常不用于 CPU。 |
| Gloo | CPU 训练(推荐) | 支持所有点对点和集合通信操作。 | GPU 性能不如 NCCL,常作为备选。 |
| MPI | 高性能计算集群 | 广泛可用性,在特定集群上高度优化。 | 需要手动编译 PyTorch 启用。 |
4.2 后端功能对比
下表对比了各种通信后端在不同设备上的支持情况(以集合通信为例):
| 集合操作 | Gloo(CPU) | Gloo(GPU) | NCCL(GPU) |
|---|---|---|---|
broadcast | |||
all_reduce | |||
reduce | |||
all_gather | |||
reduce_scatter | |||
all_to_all | |||
barrier |
4.3 MPI 后端补充说明
MPI(Message Passing Interface)是高性能计算的标准,也是 torch.distributed API 设计的参考。
使用方式:使用 MPI 后端时,进程的生成和管理由 mpirun 等 MPI 启动工具负责,因此不需要在 Python 脚本中手动使用 mp.Process 或设置 rank 和 world_size。
启动示例:
- 训练脚本中替换为
init_process(0, 0, run, backend="mpi")。 - 使用
mpirun -n 4 python myscript.py启动 4 个进程。
5. 初始化分布式环境
在使用任何分布式功能之前,必须通过初始化进程组来建立进程间的通信通道。
5.1 核心初始化函数
# 核心初始化函数
torch.distributed.init_process_group(
backend="nccl", # 通信后端
init_method="env://", # 初始化方法
rank=rank, # 进程排名
world_size=world_size, # 总进程数
)
# 状态检查函数
torch.distributed.is_available() # 分布式功能可用性
torch.distributed.is_initialized() # 进程组初始化状态
torch.distributed.is_torchelastic_launched() # TorchElastic 启动检测| 函数 | 描述 |
|---|---|
dist.init_process_group() | 初始化默认进程组,阻塞执行直到所有进程加入。 |
dist.destroy_process_group() | 销毁默认进程组,释放资源。 |
dist.is_available() | 检查分布式包是否可用。 |
dist.is_initialized() | 检查默认进程组是否已初始化。 |
⚠️ 重要提示:
init_process_group不是线程安全的。进程组的创建必须在单个线程中执行,以避免竞争条件和进程挂起。
5.2 关键参数
- backend:指定通信后端(如
"nccl"、"gloo")。 - world_size:参与训练的总进程数。
- rank:当前进程的唯一标识(
)。 - init_method:指定进程组的初始化方式(URL 字符串),默认为
"env://"。
5.3 初始化方法(init_method)
PyTorch 支持三种初始化方法,用于协调进程间的连接信息:
5.3.1 环境变量初始化(env://)——推荐
这是最常用的方法,通过设置环境变量 MASTER_ADDR、MASTER_PORT、WORLD_SIZE 和 RANK 来协调进程。这是 PyTorch 官方启动工具(如 torchrun)推荐的方法。
# 脚本启动前设置环境变量或在代码中设置 os.environ
os.environ["MASTER_ADDR"] = "10.1.1.20"
os.environ["MASTER_PORT"] = "29500"
dist.init_process_group(backend="nccl") # 自动从环境中读取配置5.3.2 TCP 初始化(tcp://)
通过指定 rank 0 进程的 IP 地址和端口进行初始化:
dist.init_process_group(
backend="nccl",
init_method="tcp://10.1.1.20:23456", # rank 0 的地址
rank=args.rank,
world_size=4,
)5.3.3 共享文件系统初始化(file://)
利用所有进程都可访问的共享文件路径来协调通信:
dist.init_process_group(
backend="gloo",
init_method="file:///path/to/shared/storage/directory/shared_file",
world_size=4,
rank=args.rank,
)注意:使用文件系统初始化时,每次初始化都应使用一个新的或为空的文件,并在完成后清理该文件。
5.4 资源清理
在训练结束时,应调用 dist.destroy_process_group() 来清理资源。这对于使用 NCCL 后端尤其重要,有助于确保 NCCL 通信器的销毁过程(ncclCommAbort)在所有 rank 上以一致的顺序执行,避免进程挂起。
6. 分布式通信原语
初始化完成后,即可使用通信原语进行进程间的数据交换。
6.1 点对点(P2P)通信
P2P 通信用于两个指定进程之间的数据传输,可分为同步和异步模式。

6.1.1 同步通信(send() / recv())
dist.send(tensor, dst):将张量发送到目标进程(dst)。dist.recv(tensor, src):从源进程(src)接收张量,并存储到预分配的tensor中。- 特性:阻塞调用,直到通信完成。
def p2p_sync_demo(rank: int, size: int):
"""同步点对点通信示例"""
tensor = torch.zeros(1)
if rank == 0:
tensor += 1
dist.send(tensor=tensor, dst=1) # 阻塞发送
else:
dist.recv(tensor=tensor, src=0) # 阻塞接收
print(f"Rank {rank} received data: {tensor[0]}")6.1.2 异步通信(isend() / irecv())
dist.isend(tensor, dst):异步发送,返回一个Request对象。dist.irecv(tensor, src):异步接收,返回一个Request对象。
def p2p_async_demo(rank: int, size: int):
"""异步点对点通信示例"""
tensor = torch.zeros(1)
request = None
if rank == 0:
tensor += 1
request = dist.isend(tensor=tensor, dst=1) # 非阻塞发送
else:
request = dist.irecv(tensor=tensor, src=0) # 非阻塞接收
# 等待通信完成
request.wait()
print(f"Rank {rank} has data: {tensor[0]}")异步通信约束:
wait()完成前禁止修改发送张量。wait()完成前禁止访问接收张量。- 违反约束将导致未定义行为。
6.2 集合通信(Collective Communication)
集合通信涉及进程组内的所有进程,是 DDP 的核心机制。所有进程必须参与并使用相同的通信原语。
6.2.1 broadcast(广播)
- 功能:将源进程(
src)的张量复制到进程组内所有其他进程。

6.2.2 gather(收集)
- 收集所有进程的
tensor到目标进程的gather_list中。 - 非目标进程的
gather_list必须为None。

6.2.3 scatter(散播)
- 将源进程的
scatter_list分发到所有进程的tensor中。 - 源进程的
scatter_list必须是长度为进程数的列表。

6.2.4 reduce(归约)
- 功能:对组
内所有进程的张量执行指定操作 (如求和、取最大值等),并将结果存储在目标进程的张量中。 - 应用:通常用于多进程计算梯度后的梯度聚合(但 DDP 使用
all_reduce)。

6.2.5 all_reduce(全归约)
- 功能:对所有进程的张量执行指定的归约操作(如求和
、取最大值 ),并将最终结果存储回所有进程的张量中。 - 用途:这是 DDP 中同步梯度的核心操作。

6.2.6 all_gather(全收集)
- 功能:收集所有进程的张量,并将一个包含所有进程张量副本的列表发送给所有进程。
- 用途:常用于同步 Batch Normalization 层统计信息,或收集所有进程的预测结果。

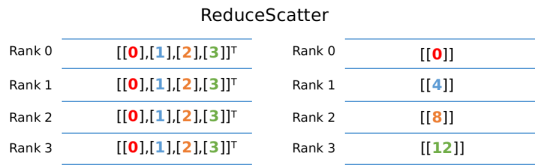
6.2.7 reduce_scatter(归约-分散)
- 功能:结合
reduce和scatter。首先对所有进程的输入张量进行归约,然后将结果分散到各个进程的输出张量中。 - 用途:是 ZeRO/Fully Sharded Data Parallel(FSDP) 等参数分片训练策略中的关键操作。
6.2.8 barrier(屏障)
- 功能:阻塞所有进程,直到进程组中的所有进程都达到屏障点后才继续执行。
- 用途:用于确保严格的进程同步。
7. 分布式训练启动工具
在实际生产环境中,通常不手动编写 mp.Process 启动脚本,而是使用 PyTorch 提供的启动工具。
7.1 torchrun(推荐)
torchrun 是 PyTorch 官方推荐的分布式训练启动器。它支持弹性(elasticity)和容错(fault tolerance),能够自动处理进程的创建、初始化和资源分配。
7.1.1 单节点多 GPU 训练
# 假设有 4 个 GPU
torchrun --nproc_per_node=4 train_script.py [训练脚本参数]7.1.2 多节点分布式训练(例如 2 个节点)
在每个节点上运行相同的 torchrun 命令,但需指定唯一的 node_rank:
# 节点 1(rank=0)
torchrun --nproc_per_node=GPU数量 \
--nnodes=2 \
--node_rank=0 \
--master_addr="192.168.1.1" \
--master_port=29500 \
train_script.py [训练脚本参数]
# 节点 2(rank=1)
torchrun --nproc_per_node=GPU数量 \
--nnodes=2 \
--node_rank=1 \
--master_addr="192.168.1.1" \
--master_port=29500 \
train_script.py [训练脚本参数]7.2 训练脚本的简化配置
当使用 torchrun 启动时,它会自动设置所有必需的环境变量(RANK、WORLD_SIZE、LOCAL_RANK 等),因此训练脚本的初始化可以大大简化:
import os
import torch
import torch.distributed as dist
from torch.nn.parallel import DistributedDataParallel as DDP
def setup_distributed_model(model: torch.nn.Module) -> DDP:
"""
使用 torchrun / env:// 方式设置分布式环境和 DDP 模型。
"""
# 1. 初始化进程组(使用默认的 env:// 方法)
# torchrun 已自动设置环境变量
dist.init_process_group(backend="nccl")
# 2. 获取当前进程的本地排名并设置设备
local_rank = int(os.environ["LOCAL_RANK"])
torch.cuda.set_device(local_rank)
# 3. 创建 DistributedDataParallel 模型
ddp_model = DDP(
model.to(local_rank),
device_ids=[local_rank],
output_device=local_rank,
)
return ddp_model
# 在训练代码的末尾,添加资源清理
# dist.destroy_process_group()7.3 最佳实践总结
- 后端选择:始终优先使用 NCCL 后端进行 GPU 训练。
- 初始化方法:统一采用
env://环境变量方式。 - 设备管理:正确设置
local_rank,确保 GPU 设备隔离。 - 资源管理:训练完成后调用
destroy_process_group()清理资源。 - 进程管理:使用
torchrun作为分布式训练启动工具。